
Four Types of Industrial Robots for Advanced Manufacturing
March 16, 2020
Blog
When you hear the word ?industrial robot? thrown around, you might think of robot arms welding cars as they travel down an assembly line, or a robotic cell quickly arranging computer chips.

Image Credit: Robot Worker.jpg: Mountain at Shanghai Science and Technology Museum via Wikimedia CCA 3.0
When you hear the word “industrial robot” thrown around, you might think of robot arms welding cars as they travel down an assembly line, or a robotic cell quickly arranging computer chips. There are, of course, a wide variety of robot configurations to suit various manufacturing needs. While it would be impossible to discuss all of them in this article, here are a few robots that you may encounter in manufacturing, or perhaps implement to solve a problem yourself.
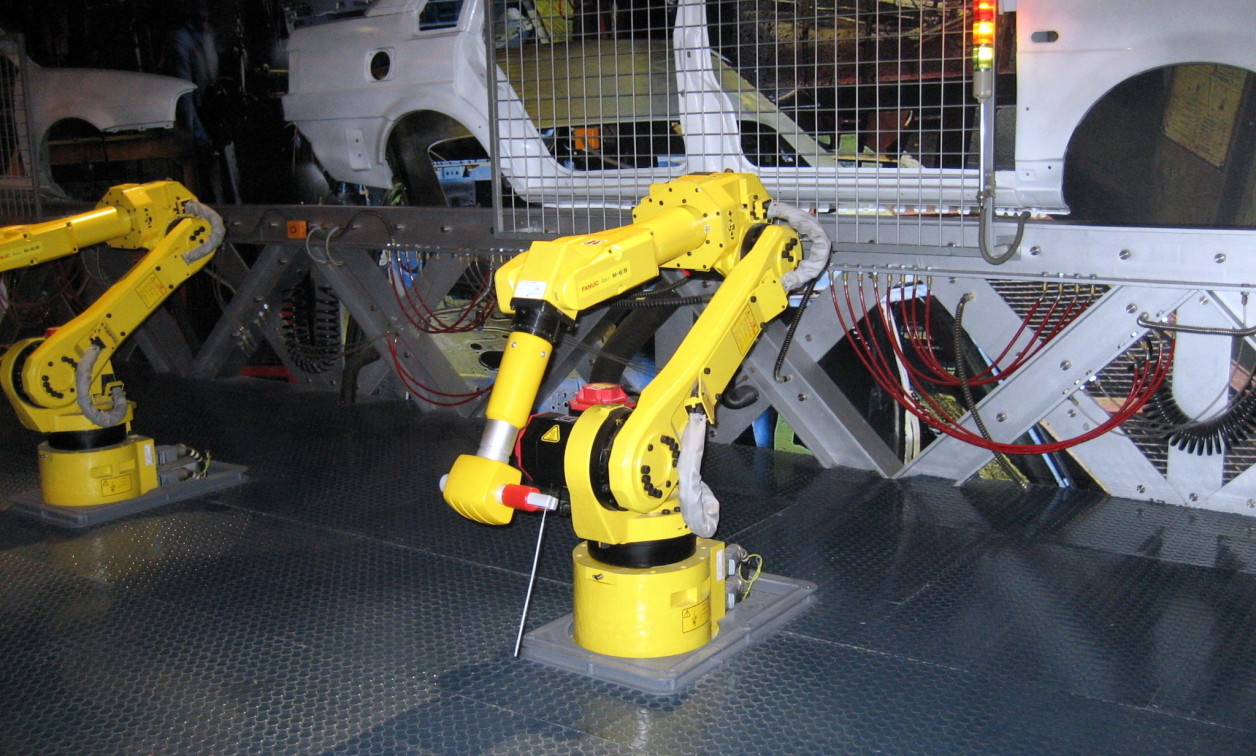
6-Axis Arm
When considering robot manipulators, 6-axis robot arms are what probably the first thing that pops into mind. With excellent precision and flexibility, these robots are implemented in a wide variety of situations. They are named for the number of controlled axes or degrees of freedom available. As defined in the video below, these robots act in a similar manner to a human arm, with axes 1 and 2 comparable to a shoulder, axes 3 and 4 imitating an elbow and forearm, and axes 5 and 6 acting as a wrist/hand assembly.
If you consider your own arm, “axes 5 and 6” don’t allow the same sort of rotation as these mechanical beasts—grab and hold your wrist and try to rotate it axially. We can, however move our wrists up, down, left, and right, so we’re not entirely outclassed. Industrial robots of this type come in configurations roughly the size of a human arm on the small end, to robots large enough to lift an automobile. Uses for this type of robot include everything from palletizing—arranging parts in an orderly manner—to general part manipulation, machining, and, of course, welding.
SCARA
As I’d guess less than 50% of the people who work on them know it stands for either selective compliance assembly robot arm, or selective compliance articulated robot arm. Personally, I’d go with the second definition as they can be used for more than assembly operations. They are, however, more limited in their application than 6-axis arms, moving primarily in a horizontal plane.
The basic idea behind these robots is that they combine powered horizontal “shoulder” and “elbow” joints to allow it to fold and reach a variety of positions on an x/y plane. A third axis moves the end effector up and down in the Z direction, while another rotates the wrist to allow it to properly arrange items axially. As seen in the video below, these robots can be extremely fast:
Gantry, Cartesian, or Linear Robot
Cartesian robots, as implied by the name, move in an x, y, and z direction, and are the most straightforward robot on this list controls-wise. An implementation of this type of robot is a CNC router, where motors control the linear movement of a cutting tool in each direction. This type of ‘bot can also be used for overhead pick-and-place operations like a SCARA or six-axis model. It can be made very large depending on the gantry setup.
Notably, other types of automation can be combined with a gantry system, providing a huge amount of versatility. Consider, for example, the machining center in the video below, which combines a gantry system with advanced wrist and base movements:
Delta Robot
Delta robots consist of three sets of motor-driven parallelograms, allowing an end effector to stay level, while moving at high speeds in a Cartesian (x, y, z) plane. While generally limited to the manipulation of light parts, their speed can present a huge advantage over other ‘bots on this list. They move fast enough that they can be difficult for humans to visually track. When implemented with its own vision system, this allows versatile pick-and-place operations as seen in the clip below:
For another sample of what these robots can do, check out this second clip by MimixMotion: With Background Noise to Verify Actual Speed. Not only is the speed here incredible, but the tracking and stacking procedure has to be seen to be believed. Note that the clip was posted 11 years ago, so presumably things have advanced even beyond what’s shown there:
Of course, these are only a few of the variations of robots available. While different manufacturers would legitimately claim certain advantages to their units, a lot of the specialization comes in the form of end effectors (hands) adapted for specific jobs. Efficient programming and careful arrangement of where parts are place can also help eke a bit more performance out of manufacturing cells. While robots advance in abilities, system integrators have to be at the top of their game and constantly learning to deliver optimum value to their customers.
About the Author
Jeremy S. Cook is a freelance tech journalist and engineering consultant with over 10 years of factory automation experience. An avid maker and experimenter, you can follow him on Twitter [https://twitter.com/JeremySCook], or see his electromechanical exploits on the Jeremy S. Cook YouTube Channel! [https://www.youtube.com/c/jeremyscook




{kind=link}