Balancing power and performance in wearables
February 01, 2015

In consumer products, replacing or recharging a battery isn't a mission-critical operation. It's just an annoyance. If that's the case, why is everyon...
In consumer products, replacing or recharging a battery isn't a mission-critical operation. It's just an annoyance. If that's the case, why is everyone so focused on power and cost for wearables and IoT devices? One reason is that today's wearables/IoT devices hold marginal benefit for consumers, at least relative to the product price. So component suppliers feel pressured to drive down costs while improving the performance and power consumption of their parts.
Today most wearables rely solely on accelerometers for activity measurements. But the problem is that all accelerometer-only based wearables do not deliver the same results. I put this to the test last year when I wore both Jawbone UP and Fitbit simultaneously in order to compare the data.
What's up with Jawbone UP and Fitbit?
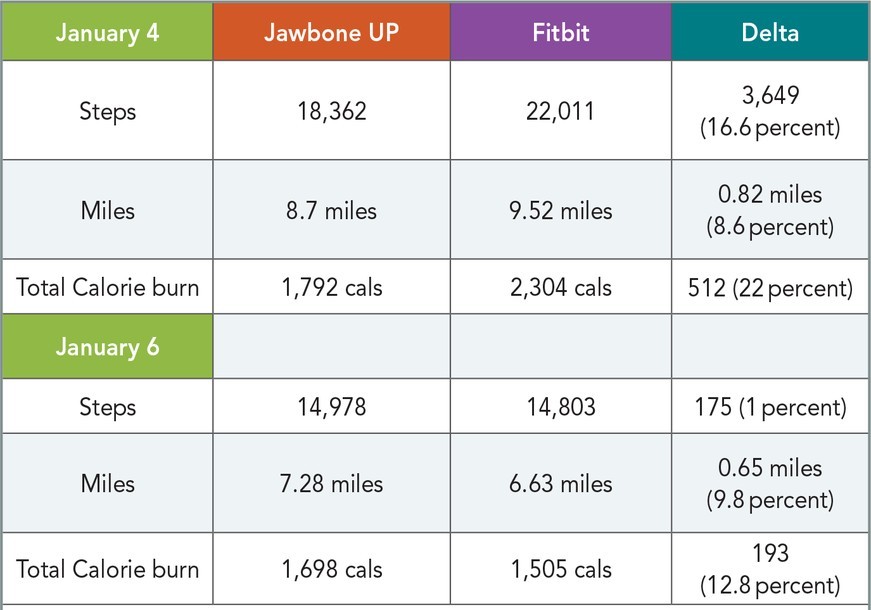
When I compared Jawbone UP and Fitbit, I found that both provided a solid overview of my daily activities and largely reported the same activity trends. While I did get a detailed breakdown on number of steps, distance traveled, and calories burned, I didn't feel all that enlightened about my daily activity levels. What's more, I was puzzled that the data from two devices were off by 10-20 percent.
|
|

|
|
Discrepancy demystified
From a technical perspective, the discrepancy between the two devices was not surprising since both Jawbone UP and Fitbit are accelerometer-only based devices, and each company uses their own algorithms to determine step count and intensity.
Accelerometers measure acceleration, and in a simple implementation, by setting a threshold trigger on the accelerometer reading, one can extract the number of steps. Hence, most accelerometer-only based systems can be easily spoofed. Shake an accelerometer-based wearable device with periodicity, and it will pick up false positive steps and soft steps, which register below the set accelerometer threshold and may not be picked up. This causes either too few or too many steps to be counted.
Today, every manufacturer's accelerometers are essentially the same. It is actually the performance of the manufacturer's algorithms that determine how wearables capture data. Clever algorithms can be developed to achieve higher-accuracy accelerometer-only step counting. PNI developed accelerometer-only based step counting algorithms optimizing both power and performance. This algorithm applies both biomechanical and heuristics-based filtering on threshold crossing features extracted over a 4-deep step buffer to accurately identify false or missing steps. In extracting the number of steps, the accelerometer-only algorithms proved to be more than 98 percent accurate while consuming less than 60 µA.
Testing algorithms for accuracy
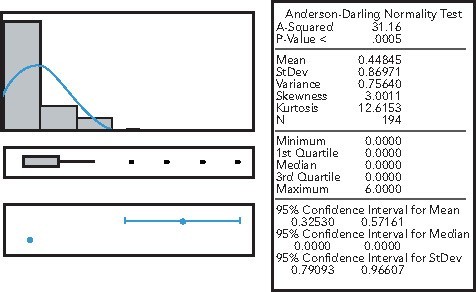
In order to test the accuracy of the algorithms, we used 194 test vectors – including Brajdic's "unconstrained smartphone" open source data[1][2], which include both slow and fast walking profiles in each file – as well as data captured by PNI, including 30+ minutes of driving data with zero steps. The total log time was 305.25 minutes with 16,726 truth steps. Our algorithm reported 16,770 step counts resulting in a step count accuracy of 100.26 percent. The algorithm produced less than 3 percent false positive (additional false steps – noted as Fp) and less than 0.5 percent false negative (missed steps – noted as Fn), with a resulting median error of 1.46 percent. The distribution of Fp and Fn are shown in Figures 2 and 3. 90.2 percent of the test vectors had 1 Fn or less while 73.7 percent had 2 Fp or less (Table 2).
|
|

|
|
|
|

The step counting algorithm is processed in the SENtral coprocessor, and the total average power consumption – including the 3-axis accelerometer – was less than 60 µA, which is equivalent to 17,000 hours on an alkaline AAA battery. These results look very good, and seem more than sufficient as a pedometer.
The power-cost question
Knowing that consumer products such as wearables are in cost-sensitive markets, is it worth it to include additional sensors even if it increases power consumption and cost? If a device is over $100, requires set-up, and needs to be charged once a week, I would want it to be more than just a pedometer. As long as it can maintain an acceptable power-consumption level and cost about the same as an accelerometer-only product, adding more sensors and functionality makes good sense. With MEMS gyroscopes (gyros) proliferating in smartphones, making them small, reasonably low power, and affordable, adding a gyro to a wearable could be an ideal solution.
Hacked phone time
PNI's accelerometer-only step counting algorithm outputs step frequency, which the user can use in combination with leg length to relate the step count to step distance. However, adding a gyro input to the sensor fusion algorithm is an even better solution. It allows for accurate distance traveled without user input (calibration) and reduces false and missed steps. That's because the gyro lets us accurately maintain both the instantaneous and long-term Earth frame reference for gravitational and linear accelerations.
We wanted to put the gyro addition to the test so we took two Nexus 5 phones and modified the hardware to include PNI's M&M modules, which include a SENtral coprocessor running motion sensor fusion algorithms, and inertial sensors from either ST or Bosch and AKM. Although the Nexus phones have gyros, accelerometers, and magnetic sensors, we needed to hack the phone to include the M&M modules so we could easily control the sensors in Android and run low-power step counting algorithms from SENtral. We used two Nexus 5 phones, one with accelerometer-only step counting algorithms and the other with an accelerometer- and gyroscope-based pedestrian dead reckoning (PDR) algorithms. Holding these two phones on top of each other (Figure 4), we went around a test bench in the lab multiple times, walking 101 steps.
|
|

Figure 5 shows the result after 101 steps. It is interesting to note that both algorithms report 101 steps, but the device to the right running PDR algorithms – using both a gyroscope and accelerometer – reported distance traveled without having to calibrate or input the users stride length. It was also able to trace the user's path of travel.
|
|

As we know from earlier tests, an accelerometer-only based system has limitations. It cannot track the user's path of travel and cannot automatically calculate distance traveled unless the user inputs their average stride length. And using average stride length to calculate distance traveled is not as accurate as measuring the distance traveled for each step via a gyroscope with sensor fusion algorithms.
Worth the investment
Adding a gyro to a wearable device is a logical choice. The results from an accurate PDR algorithm could allow us to create more compelling wearable applications, such as tracking lost children in a mall or monitoring elders. That's more compelling than mere activity monitoring, for example, and it's just the tip of the iceberg as to where these applications will ultimately go.
It's true that there are additional costs and power to consider. The incremental bill of materials (BOM) cost to add a gyroscope would be $1-$2 for the gyro and another $1 for added processing. The increase in power would be an additional 1-2 mA for the gyro and about 400 µA to run the PDR algorithm. That's just $2-$3 in incremental hardware costs.
While the increased system power is more than 20 times that of an accelerometer-only based step counter, the total system would run for about 12 hours. By opening up new classes of applications to wearables, that's a trade-off I am willing to make. Manufacturers looking for that competitive edge in a fast-moving marketplace will see it the same way. If adding a gyro requires only incremental costs/power consumption, but brings them vast numbers of new customers, then gyro- and accelerometer-based wearables are in our near future.
References
[1] Brajdic, Agata, and Robert Harle. "Walk detection and step counting on unconstrained smartphones." In Proceedings of the 2013 ACM International Joint Conference on Pervasive and ubiquitous computing, 2013, pp. 225-234.
[2] www.cl.cam.ac.uk/~ab818/ubicomp2013.html
PNI Sensor Corporation